丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂DDS廃攇悢摿惈應掕憰抲
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂乮嶲峫暥專乯丂俹俬俠偱妝偟傓倀俽俛婡婍乮夵掕怴斉乯丂屻娬揘栫 挊丂媄弍昡榑幮丂2011 9
丂丂俢俢俽乮僟僀儗僋僩丒僨僕僞儖丒僔儞僙僒僀僓乕乯偵丄俹俠擖椡偵傛傞廃攇悢愝掕抣傪僔儕傾儖偱憲偭偰憒堷偟丄僆乕僨傿僆 乣 拞攇掱搙偺奺廃攇悢偺惓尫攇傪楢懕揑偵弌椡偟丄旐應掕暔偐傜偺擖椡傪懳悢曄姺偟偰倓俛偺悢抣偲偟丄倀俽俛乮俠俢俠僋儔僗乯偱僷僜僐儞偵憲傝丄廃攇悢亅倓俛偺僌儔僼傪昞帵偡傞丅 巊梡偟偰偄傞晹昳乮俢俢俽丗 俙俢俋俉俆侾丄儘僌傾儞僾丗 俙俢俉俁侽俈乯偼 傗傗夁忚昳幙婥枴偩偑丄懠偵戙懼昳偑柍偄偺偱暥專偵廬偭偰偙傟傜傪梡偄偨偑丄寢壥揑偵偼僐儞僷僋僩偵嶌傞偙偲偑偱偒偨丅
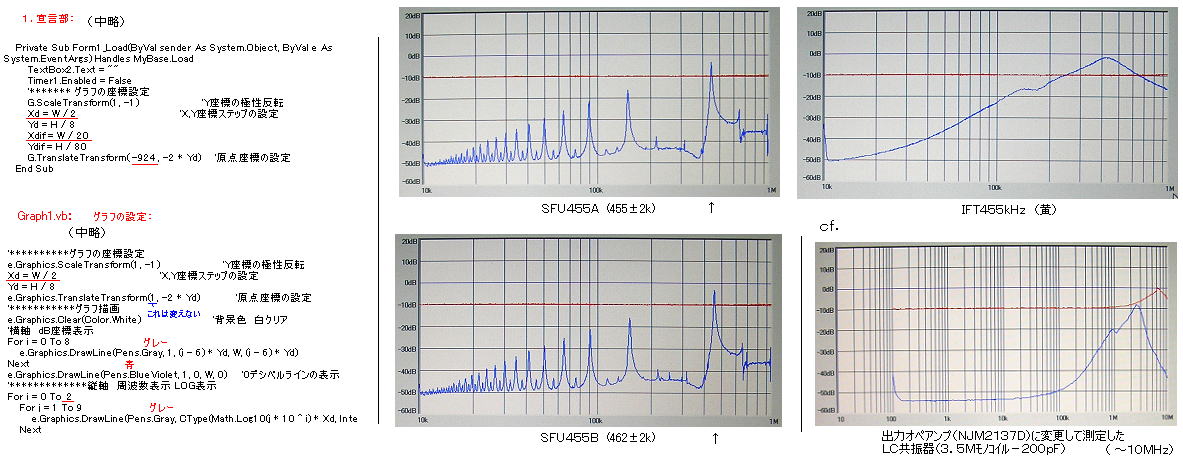
丂丂僷僜僐儞夋柺偺僜僼僩偼丄儅僀僋儘僜僼僩偑柍彏攝晍偟偰偄傞倁俛乮價僕儏傾儖丒儀乕僔僢僋乯偱嶌惉偟丄僐儞僩儘乕儖夋柺偱廃攇悢斖埻乮忋尷丒壓尷乯丄暘夝擻丄應掕奐巒摍傪擖椡偟丄帺摦揑偵尰傟傞僌儔僼傿僢僋夋柺偱 曅懳悢栚惙傝偺廃攇悢亅倓俛 偺僌儔僼傪儕傾儖僞僀儉偱昞帵偟丄傑偨 僨乕僞傪曐懚乮俠俽倁宍幃乯偱偒傞傛偆偵偡傞丅
丂丂侾丏丂僴乕僪僂僄傾偲 儅僀僐儞偺僾儘僌儔儉丗
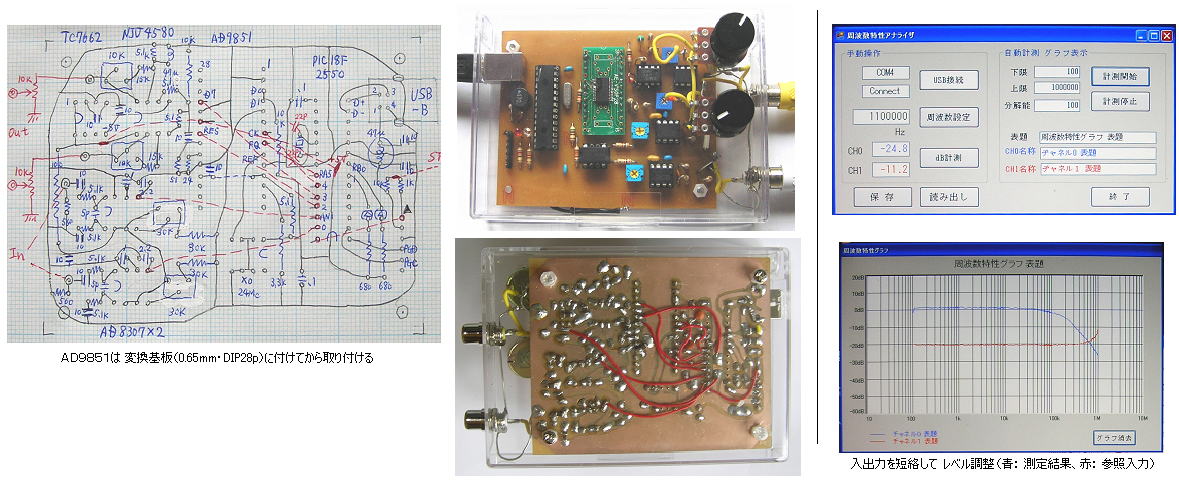
丂丂俢俢俽偲偟偰 戙昞揑側 俙俢俋俉俆侾乮僼儔僢僩丄俀俉倫丄侽丏俇俆倣倣僺僢僠丄揹尮俆倁乯傪 俢俬俹曄姺婎斅偵晅偗偰巊梡偟偨丅乮仏 曄姺婎斅傊偺敿揷晅偗偼丄掅梈揰偼傫偩傪梡偄丄僼儔僢僋僗偵捫偗偨僜儖僟乕僂傿僢僋偱媧偄庢傞乯丂偙傟偼丄惂屼曽朄傪僔儕傾儖偵愝掕偟偨屻丄僷僜僐儞偐傜偺 係侽價僢僩偺廃攇悢愝掕怣崋乮撪丄俁俀價僢僩偑廃攇悢抣丄俉價僢僩偑懠偺惂屼抣乯傪庴偗偰丄侾侽侽俵俫倸埲忋偺堦掕弌椡偺惓尫攇乮傑偨偼曽宍攇乯傪弌椡偱偒傞丅偙偙偱偼丄俆倁俹俬俠儅僀僐儞乮俹俬俠侾俉俥俀俆俆侽乯偺僜僼僩惂屼側偺偱懍搙傪忋偘傞偙偲偑偱偒偢丄僆乕僨傿僆廃攇悢 亄 兛 掱搙偵尷掕偟偰丄弌椡揹埑傪偱偒傞偩偗堦掕偵偟偨惓尫攇傪嶌傞偙偲偵偡傞丅乮偙偺憰抲偺應掕斖埻偼丄侾侽俫倸 乣 悢俵俫倸乯
丂丂乮仏丂扨弮側怣崋敪惗尮偲偡傞側傜偽丄俢俢俽傪梡偄偰悢廫俵俫倸偼梕堈偵嶌傞帠偑偱偒傞丅乯
丂丂俢俢俽偺弌椡晹偵偼丄俶俰倀係俆俉侽俢乮斈梡俫倝俥倝僆儁傾儞僾乯偺戙傢傝偵丄傕偆彮偟崅廃攇懁偱弌椡摿惈偑堦掕偵側傞傛偆偵 俶俰俵俀侾俁俈俢乮峀懷堟 俀侽侽俵俫倸乯傪梡偄偨丅 惓尫攇弌椡傪亇偵怳傞偨傔偵丄亅俆倁揹尮傪 俿俠俈俇俇俀俛乮僠儍乕僕億儞僾 俢俠-俢俠僐儞僶乕僞乕乯偵傛偭偰嫙媼偟偨丅
丂丂亄俆倁揹尮偼僲僀僘彍嫀僼傿儖僞傪擖傟偰倀俽俛偐傜庢偭偨丅乮慡懱偱栺侾俆侽倣俙丄俢俢俽偺俬俠偼彮偟敪擬偡傞乯
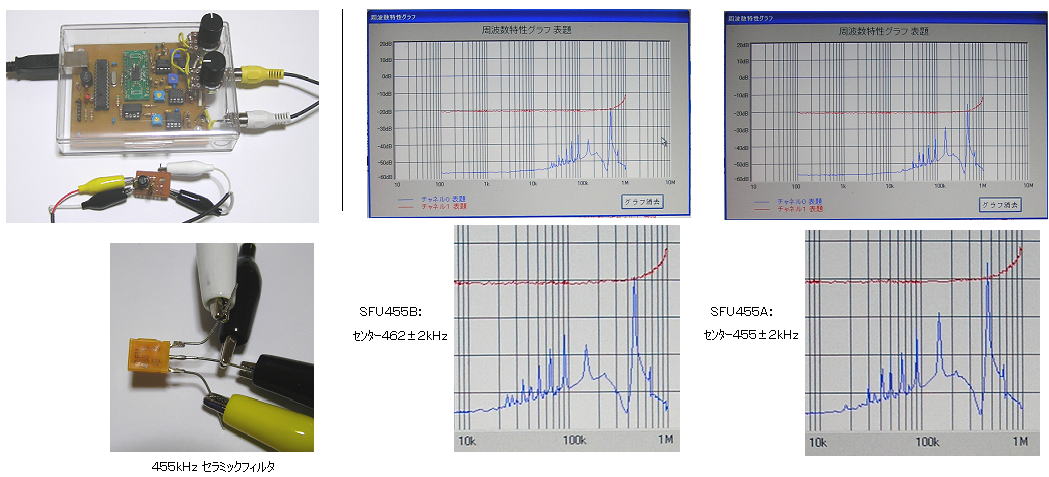
丂丂旐應掕暔偐傜偺擖椡偼丄儘僌傾儞僾乮懳悢傾儞僾丄俙俢俉俁侽俈丄擖椡俆侽侽俵俫倸傑偱捈慄惈椙偔堦掕弌椡乯偱庴偗丄擖椡揹埑儗儀儖傪 倓俛儗儀儖偵曄姺偟丄偝傜偵偦偺弌椡傪 俹俬俠儅僀僐儞偺傾僫儘僌抂巕偱庴偗丄俙俢曄姺偵傛傝悢抣壔偟偰僷僜僐儞傊憲傝丄嶌惉偟偨僷僜僐儞撪僜僼僩偵傛偭偰僌儔僼壔偟偨丅 掅廃攇懁偺壓尷偼丄儘僌傾儞僾弌椡偱愙抧偝傟偰偄傞僷僗僐儞乮俀丏俀兪俥*乯偵傛偭偰寛傑傞丅
丂丂乮仏仏丂儘僌傾儞僾偼 倓俛僗働乕儖偺揹奅嫮搙寁丄憶壒寁側偳偵偦偺傑傑梡偄傞偙偲偑偱偒傞丅傑偨丄惍棳屻偺 俢俠擖椡偺懳悢曄姺側傜偽丄僔儕僐儞僟僀僆乕僪偺摿惈傪惗偐偟偰傕嬤帡揑偵偼壜擻 仺 乮嶲徠乯幖搙寁偺僿僢僪乯
丂
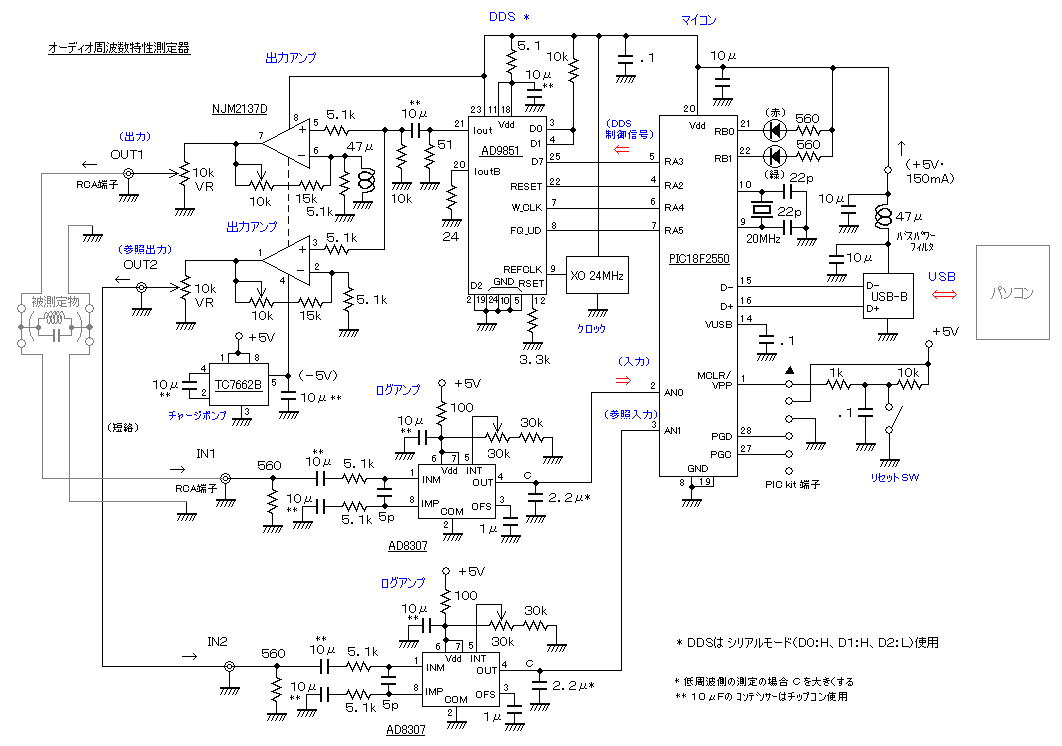
丂丂俢俢俽 俬俠偺 俙俢俋俉俆侾俛俼俽偺 乮俢侽丄俢侾丄俢俀乯亖乮俫丄俫丄俴乯偵屌掕偟偨忬懺偱丄倂_俠俴俲丄俥俻_倀俢偵僷儖僗侾屄傪梌偊傞偲丄僔儕傾儖儌乕僪偵側傞丅 侾偮偺 僔儕傾儖惂屼怣崋偼係侽價僢僩偱丄
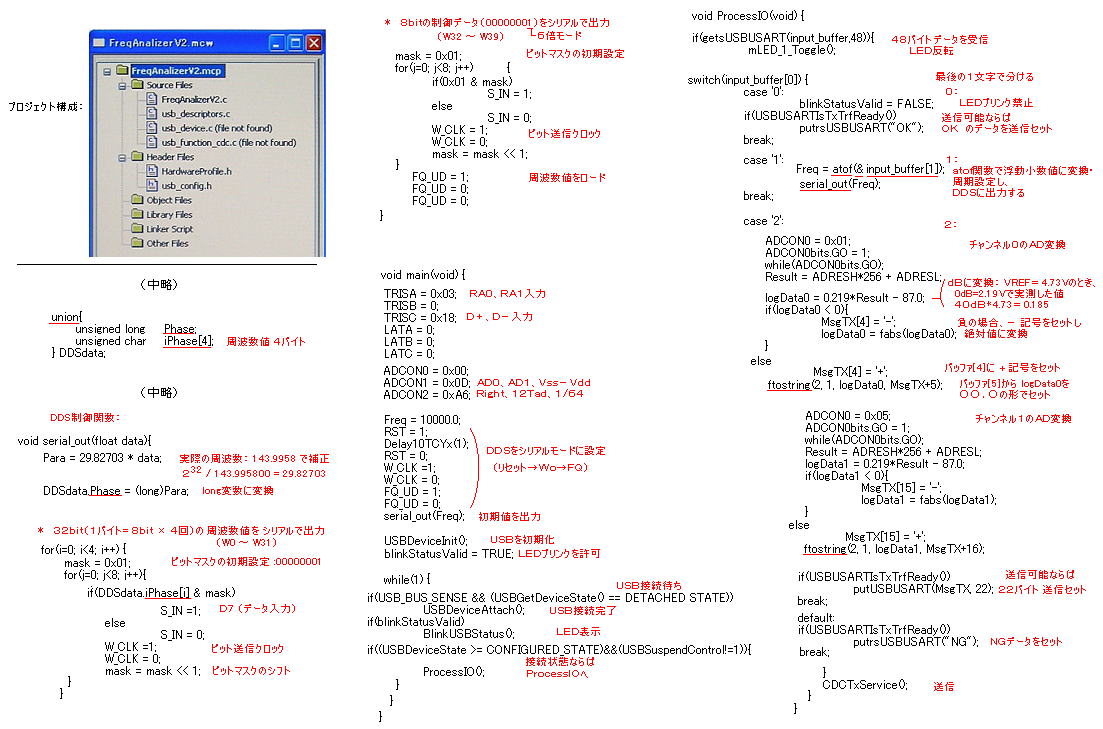
丂丂丂丂倂侽 乣 倂俁侾丗丂廃攇悢僨乕僞乮俁俀價僢僩乯丄丂倂俁俀丗 亖侾偱 僋儘僢僋亊俇乮敪怳 俀係俵俫倸亊俇亖侾係係俵俫倸乯丄丂乮倂俁俁亖侽乯丄丂倂俁係丗 亖侽偱 徣揹椡儌乕僪偵偟側偄丄丂倂俁俆乣俁俋丗 埵憡僨乕僞乮俁俇侽搙傪俁俀暘妱乯丄偲側傞丅 廃攇悢偼丄偙偺俁俀價僢僩偺暘妱乮侽 乣 俀32 = 4294967296乯偱摼傜傟丄侾係係俵俫倸偺応崌偼丄丂愝掕偱偒傞廃攇悢偺嵟彫暘夝擻 亖 144000000/4294967296 亖 侽丏侽俁俁俆 俫倸 偵側傞偺偱丄
丂丂丂丂丂亪丂丂弌椡廃攇悢丂亖丂侽丏侽俁俁俆 亊 乮倂侽乣俁侾偺愝掕抣乯丂丂丂偲側傞丅丂乮仏丂float 偼丄係僶僀僩 晜摦彫悢宆曄悢丗 亇侾侽-37 乣 亇侾侽38乯
丂丂儅僀僐儞僾儘僌儔儉偱偼丄俠俢俠僋儔僗乮USB Device - CDC - Basic Demo乯傪悧宍偲偟偰 俹俬俠侾俉俥俀俆俆侽 傪梡偄傞丅乮懠偺妱崬傒偑柍偄偺偱栤戣側偔巊偊傞丅乯
丂丂僿僢僟乕僼傽僀儖偺 HardwareProfile.h 傪廋惓偟丄侾丏揹尮嫙媼曽朄偺専弌丄僋儘僢僋廃攇悢乮係俉俵俫倸乯丄 俀丏俢俢俽梡俬/俷僺儞偺巜掕丄傪偁傜偐偠傔愝掕偟偰丄僾儘僕僃僋僩偵庢傝崬傓丅
丂丂乮丂拲乯丂僾儘僕僃僋僩峔惉偺 usb device.c丂偼丄價儖僪偡傞偲丄儈僗儅僢僠僄儔乕偑弌傞偺偱丄暥專偺俠俢傛傝 USB_Book\Microchip\USB 偐傜 usb_device.c 乮侾侾係倠俛乯傪僼僅儖僟偵堏怉偟偨丅僶乕僕儑儞晄柧乯
丂丂乮僴乕僪僂僃傾僾儘僼傽僀儖乯
丂丂丂

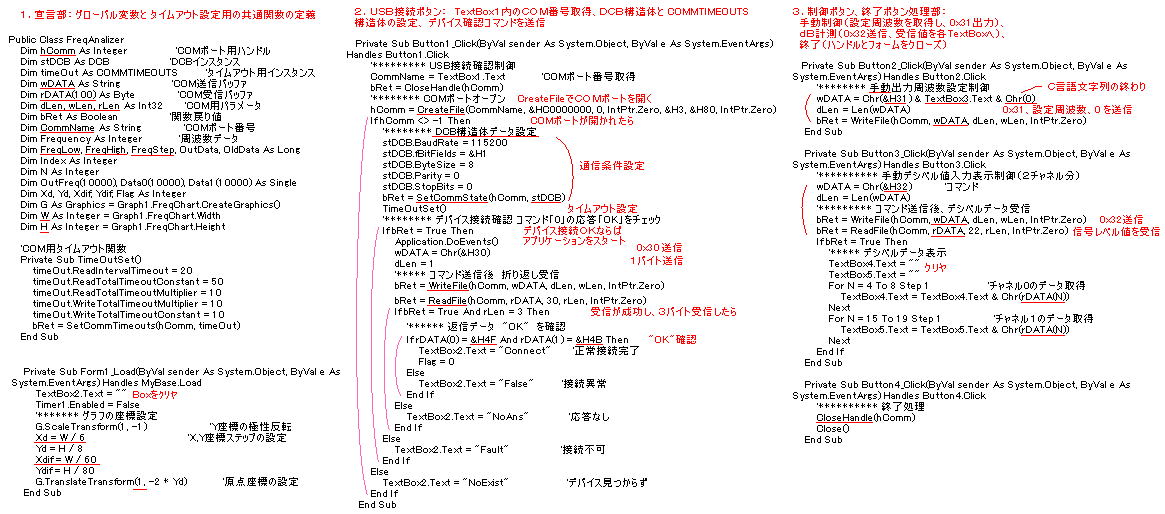
丂丂儐乕僓乕傾僾儕丒僾儘僌儔儉偱偼丄弶婜愝掕偺屻丄儊僀儞儖乕僾偱偼 倀俽俛偺愙懕姰椆丄倀俽俛忬懺偺俴俤俢昞帵偺傒偱丄俹倰倧們倕倱倱俬俷乮乯偵旘傇丅
丂丂俹倰倧們倕倱倱俬俷乮乯偱偼丄倀俽俛庴怣亄廃攇悢愝掕弌椡丄 擖椡偺俙俢曄姺亄倀俽俛憲怣側偳偺儊僀儞張棟傪峴偆偨傔偵丄俹俠偲儅僀僐儞偺娫偵埲壓偺婯懃傪掕傔傞丅
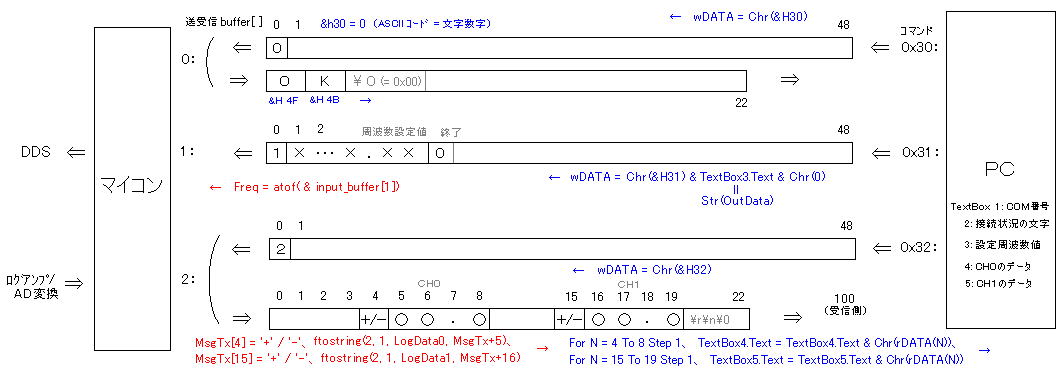
丂丂丂侽丗丂愙懕偺妋擣丗丂丂丂俹俠 仺 儅僀僐儞丂丒丒丒丂0x30丄丂丂丂丂儅僀僐儞 仺 俹俠丂丒丒丒丂妋擣偺墳摎 乽俷俲 亸侽乮亖0x00乯乿 傪曉偡
丂丂丂侾丗丂廃攇悢愝掕丗丂丂丂俹俠 仺 儅僀僐儞丂丒丒丒丂0x31 xxxxx 亸侽丂乮xxxxx 丗 廃攇悢愝掕抣乯丄丂丂儅僀僐儞 仺 俹俠丂丒丒丒丂乮側偟乯
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丒丂倎倲倧倖 娭悢偼 彫悢宆暥帤楍傪 晜摦彫悢乮倖倢倧倎倲乯偵曄姺丄 math.h 偵娷傑傟傞
丂丂丂俀丗丂寁應偺梫媮丗丂丂丂俹俠 仺 儅僀僐儞丂丒丒丒丂0x32丄丂丂丂丂儅僀僐儞 仺 俹俠丂丒丒丒丂僠儍儞僱儖侾丄俀偺怣崋儗儀儖抣傪 乽CH0=亇xx.x仮仮CH1=亇yy.y\r\n\0乿 偲偄偆暥帤楍偱曉偡
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丒丂倖倲倧倱倲倰倝値倗 娭悢偼 僾儘僌儔儉拞偵嶌惉偟偰偄傞傕偺偱丄晜摦彫悢抣傪暥帤楍偵曄姺丗丂倖倲倧倱倲倰倝値倗乮惍悢丄彫悢丄僨乕僞丄僶僢僼傽乯
丂丂俹俠 偐傜偺 0x30 側偳偺嵟屻偺侾暥帤 0 丄1丄2 乮亖 input_buffer[0] 乯偱丄switch 暥偵傛傝 case 0丄1丄2 偵怳傝暘偗丄偦傟偧傟偺張棟傪偡傞丅丂case 2 偺応崌偼丄儘僌傾儞僾偐傜偺懳悢傾僫儘僌擖椡傪 俙/俢曄姺偟丄墘嶼傪壛偊偰丄僨乕僞傪 俹俠偵憲傞丅
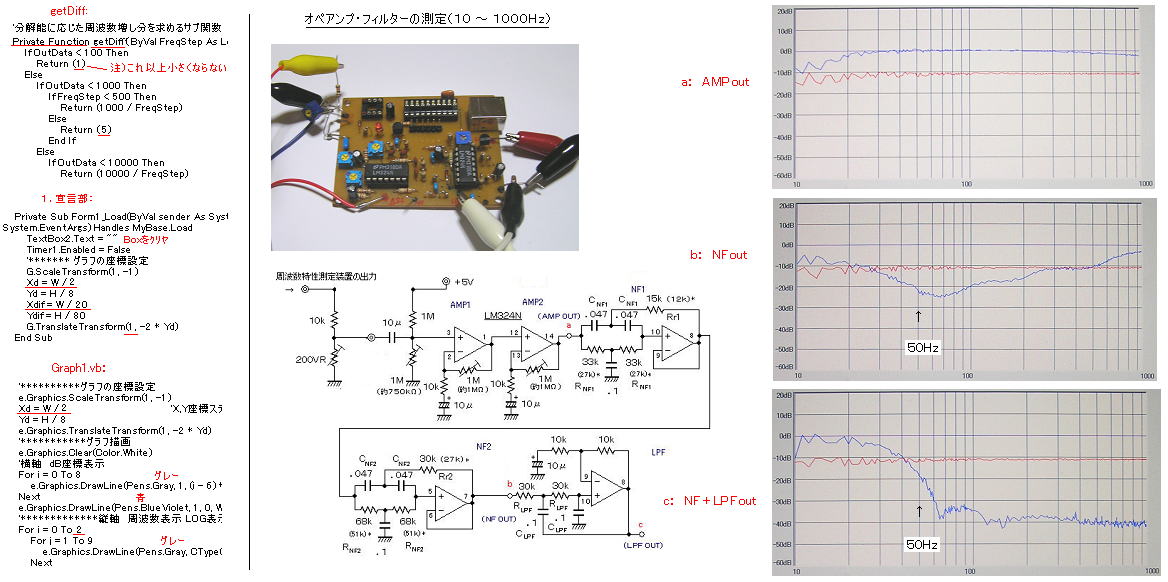
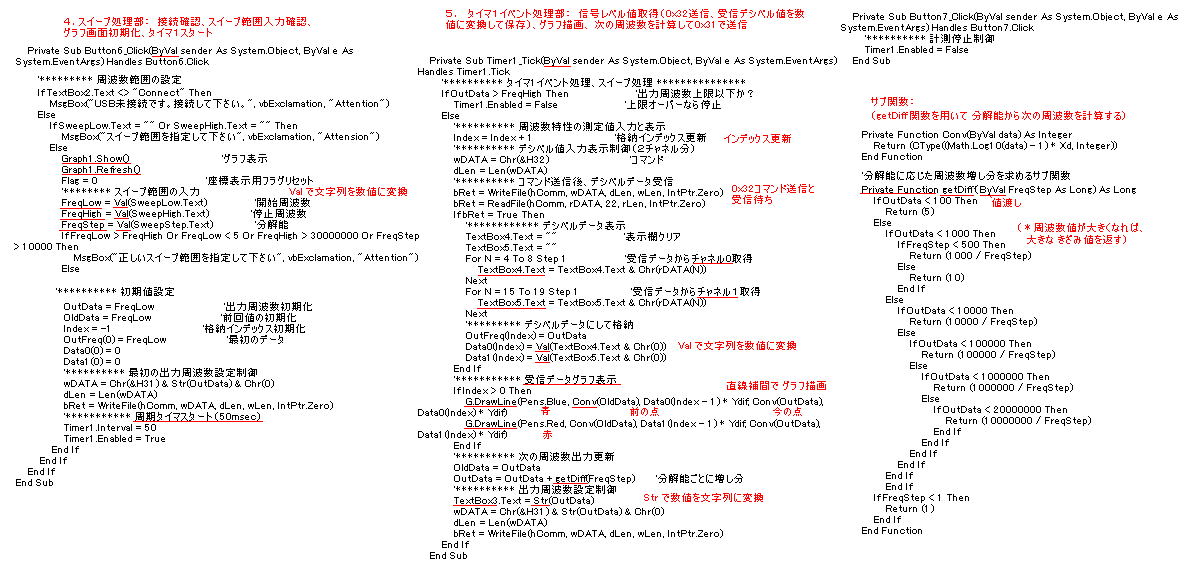
丂丂僗僀乕僾摦嶌偱偼丄廃攇悢愝掕抣偛偲偵 憰抲偺 俠俫侽丄侾偺僨乕僞傪庴偗庢傝丄俹俠僌儔僼傿僢僋偺昤夋傪峴偆丄偲偄偆僒僀僋儖傪丄寁應斖埻偑廔椆偡傞傑偱孞傝曉偡丅
丂丂乮儐乕僓乕傾僾儕晹乯
丂
丂丂丂仠丂僜乕僗丗
丂丂俀丏丂惂屼僂傿儞僪僂偲 僌儔僼傿僢僋偺 俹俠僾儘僌儔儉丗
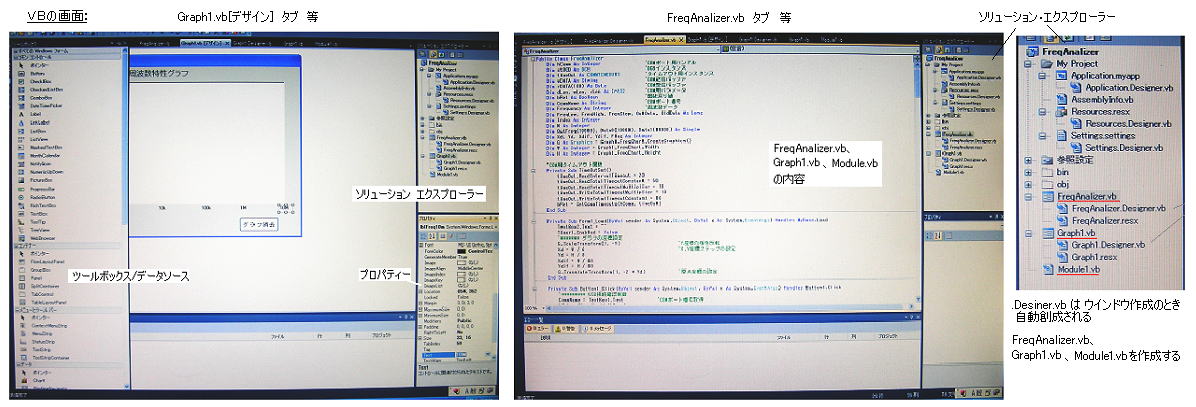
丂丂儅僀僋儘僜僼僩偑柍彏攝晍偟偰偄傞 價僕儏傾儖丒儀乕僔僢僋乮倁俛乯乮偁傞偄偼丄倁俠++丄倁俠仈丂丒丒丒丂儕價儖僪壜乯傪梡偄偰丄 乮侾乯 惂屼僂傿儞僪僂偲丄乮俀乯 僌儔僼傿僢僋丒僂傿儞僪僂 傪嶌惉偡傞丅
丂丂僂傿儞僪僂偺尨宆榞偼弶傔偐傜梡堄偝傟偰偄偰丄嘆 僼僅亅儉僨僓僀儞乮[僨僓僀儞]丄偁傞偄偼丄丏俢倕倱倝値倕倰丏倴倐乯偲偟偰 僒僀僘丄儃僞儞傗儔儀儖乮暥帤丒悢帤乯側偳傪晅偗壛偊丄婎杮僼僅乕儉偲偡傞丅丂偦傟偐傜 嘇 儐乕僓乕傾僾儕乮丏倴倐乯偲偟偰儅僀僐儞偲偺倀俽俛捠怣傗惂屼朄丄昞帵朄側偳偺嬶懱揑側婡擻傪梌偊傞丅 乮嘆 偼丄倁俛偺僣乕儖儃僢僋僗丄僾儘僷僥傿乕側偳偵傛傝丄僂傿儞僪僂傪壛岺偡傞偲偒偵帺摦揑偵憂惉偝傟傞丅倁俛晅懏偺椺戣乮僠儏乕僩儕傾儖乯嶲徠丅乯
丂丂嶌惉拞偺僾儘僌儔儉偼丄價儖僪乮亙僨僶僢僌乯偟偰偐傜僨僶僢僌偡傞偲惂屼僂傿儞僪僂丄僌儔僼傿僢僋偑尰傟丄婡擻傪僠僃僢僋偟側偑傜嶌惉偡傞偙偲偑偱偒傞丅
丂丂仏丂攝晍尦丗丂丂倁倝倱倳倎倢 俛倎倱倝們 俀侽侾侽 俤倶倫倰倕倱倱丗丂丂http://www.microsoft.com/ja-jp/dev/express/default.aspx
丂丂乮儅僀僐儞亅俹俠 娫偺 俠俢俠乮暥帤捠怣乯僶僢僼傽乯丂丂捠怣丗 侾僶僀僩 亖 俉 倐倝倲
丂
丂丂乮儐乕僓乕傾僾儕晹乯
丂丂仠丂俠俷俵億乕僩梡 倂倝値倓倧倵倱 俙俹俬 娭悢丗丂丂倀俽俛亅俠俢俠僨僶僀僗傪 俹俠偵愙懕偡傞偲丄昗弨僨僶僀僗僪儔僀僶偲側偭偰丄帺摦揑偵俠俷俵億乕僩偑捛壛偝傟傞丅俠俷俵億乕僩偺捠怣偼丄Windows偱梡堄偝傟偰偄傞俙俹俬 娭悢偱婰弎偡傞丅 偙偺娭悢孮傪巊偆偨傔偵丄撈棫偟偨儌僕儏乕儖丂俵倧倓倳倢倕侾丏倴倐 偑昁梫偲側傝丄偦偺傑傑 僜儕儏乕僔儑儞偵捛壛偡傞丅
丂丂偙偺捠怣忦審偺僷儔儊乕僞偵丄俢俠俛峔憿懱乮僨僶僀僗惂屼梡偺忣曬傪奿擺乯偲 COMMTIMEOUTS峔憿懱乮憲庴怣偺僞僀儉傾僂僩帪娫偺愝掕乯偑梡偄傜傟丄偙傟偵傛偭偰 俠俷俵億乕僩傪乽僼傽僀儖乿偲偟偰憖嶌偡傞偙偲偑偱偒傞丅
丂丂丂丂丂CreateFile丗 俠俷俵億乕僩僆乕僾儞丄丂丂栠傝抣乮 = hComm乯 亖丂CreateFile乮僼傽僀儖柤乮乭俠俷俵侾乭側偳偺暥帤楍乯丄丂僆乕僾儞曽朄乮&HC0000000 偱 撉傒彂偒椉梡乯丄丂嫟桳儌乕僪乮侽 偱嫟桳偟側偄乯丄丂僙僉儏儕僥傿乕懏惈乮俬値倲俹倲倰丏倅倕倰倧 偱 晄巊梡乯丄丂婛懚僼傽僀儖偺張棟乮&H3 偱婛懚僼傽僀儖僆乕僾儞乯丄丂僼傽僀儖偺懏惈乮&H80 偱 柍偟乯丄丂僥儞僾儗乕僩僼傽僀儖乮俬値倲俹倲倰丏倅倕倰倧 偱 晄巊梡乯乯丄丂丂栠傝抣丗 惉岟丗僴儞僪儖抣丄幐攕丗亅侾
丂丂丂丂丂CloseHandle丗 俠俷俵億乕僩僋儘乕僘丄丂丂栠傝抣 亖丂CloseHandle乮億乕僩偺僴儞僪儖抣乮CreateFile偱庢摼偟偨巜掕億乕僩 = hComm乯乯丄丂丂栠傝抣丗 惉岟丗俥倎倢倱倕乮侽乯丄幐攕丗摨偠僴儞僪儖抣
丂丂丂丂丂SetCommState丗丂捠怣忦審偺愝掕丄丂丂栠傝抣 亖丂SetCommState乮億乕僩偺僴儞僪儖抣丄丂俢俠俛峔憿懱億僀儞僞乮= stDCB乯乯丄丂丂栠傝抣丗 惓忢丗侽丄 僄儔乕丗亅侾丂
丂丂丂丂丂丂丂丂丂丂丂丂丂丂仏丂stDCB 偺撪梕丗丂丂.DCBlength丗 峔憿懱偺僒僀僘乮婯掕抣偺傑傑乯丄丂.BaudRate丗 儃乕儗乕僩乮= 19200bps乯丄丂丂.fBitFields丗 價僢僩偛偲偵晅偗傜傟偨惂屼巜掕乮價僢僩俶倧侾丗 侾偺偲偒僶僀僫儕儌乕僪乮1乯丄 俀丗 侾偺偲偒僷儕僥傿乕僠僃僢僋桳傝乮0乯丄 俁丗 侾偺偲偒俠俿俽惂屼傪偡傞乮0乯丄 係丗 侾偺偲偒俢俽俼傪娔帇惂屼乮0乯丄丂俆丄俇丗 俢俿俼偵傛傞僴儞僪僔僃僀僋乮00偱 偟側偄乯丄 俈丗 侾偺偲偒俢俽俼偑僆僼偺偲偒庴怣僨乕僞傪柍帇乮0乯丄丂俉丗 侾偺偲偒倃倧倖倖暥帤憲怣屻傕憲怣懕偗傞乮0乯丄 俋丗 侾偺偲偒倃倧倖倖暥帤庴怣屻憲怣掆巭偟倃倧値偱嵞奐乮0乯丄 侾侽丗 侾偺偲偒僶僢僼傽嬻偒偱倃倧倖倖丄倃倧値傪憲怣乮0乯丄 侾侾丗 侾偺偲偒僷儕僥傿乕僄儔乕張棟乮0乯丄 侾俀丗 侾偺偲偒僰儖暥帤傪攋婞乮0乯丄 侾俁丄侾係丗 俼俿俽偵傛傞僴儞僪僔僃僀僋巜掕乮00乯丄 侾俆丗 侾偺偲偒僄儔乕敪惗偵傛傝撉傒彂偒掆巭乮0乯丄 侾俇丗 枹巊梡乮0乯丂丂丒丒丒丒丂&H1乮&H丗侾俇恑悢 偱侾乯 亖丂0000000000000001 乯丄丂丂.ByteSize丗 僨乕僞偺價僢僩悢乮俈 or 俉 偺偆偪 8乯丄丂丂.Parity丗 侽偱僷儕僥傿乕側偟丄丂.StopBits丗 侽偱侾價僢僩丄丂.XonChar丗 倃倧値暥帤巜掕乮婯掕抣乯丄丂.XoffChar丗 倃倧倖倖暥帤巜掕乮婯掕抣乯丄丂側偳乯
丂丂丂丂丂GetCommState丗丂億乕僩偺尰嵼忬懺妋擣丄丂丂栠傝抣 亖丂GetCommState乮億乕僩偺僴儞僪儖抣丄丂俢俠俛峔憿懱億僀儞僞乯丄丂丂栠傝抣丗丂惉岟丗侾丄幐攕丗侽
丂丂丂丂丂ReadFile丗 僨乕僞庴怣丄丂丂栠傝抣 亖丂ReadFile乮億乕僩偺僴儞僪儖抣(= hComm)丄丂庴怣僶僢僼傽偺億僀儞僞乮= rDATA乯丄丂庴怣僶僀僩悢乮= 俁侽丄俀俀摍丂丒丒丒丂懡傔偵巜掕乯丄丂庴怣姰椆僶僀僩悢乮= rLen丂丒丒丒丂幚嵺偵庴怣偟偨僶僀僩悢乯丄丂俬値倲俹倲倰丏倅倕倰倧乮晄巊梡乯乯丄丂丂栠傝抣丗丂惉岟丗侾丄幐攕丗侽
丂丂丂丂丂WriteFile丗 僨乕僞憲怣丄丂丂栠傝抣 亖丂WriteFile乮億乕僩偺僴儞僪儖抣(= hComm)丄丂憲怣僶僢僼傽偺億僀儞僞乮= wDATA乯丄丂憲怣僶僀僩悢(= dLen)丄丂憲怣姰椆僶僀僩悢乮= wLen乯丄丂俬値倲俹倲倰丏倅倕倰倧乮晄巊梡乯乯丄丂丂栠傝抣丗丂惉岟丗侾丄幐攕丗侽
丂丂丂丂丂SetCommTimeouts丗 僞僀儉傾僂僩帪娫愝掕丄丂丂栠傝抣 亖丂SetCommTimeouts乮億乕僩偺僴儞僪儖抣丄丂COMMTIMEOUTS峔憿懱柤乯丄丂丂栠傝抣丗丂惉岟丗侾丄幐攕丗侽
丂丂乮侾乯丂俥倰倕倯俙値倎倢倝倸倕倰丏倴倐丗
丂丂乮俀乯丂俧倰倎倫倛侾丏倴倐丄丂俵倧倓倳倢倕侾丏倴倐丗
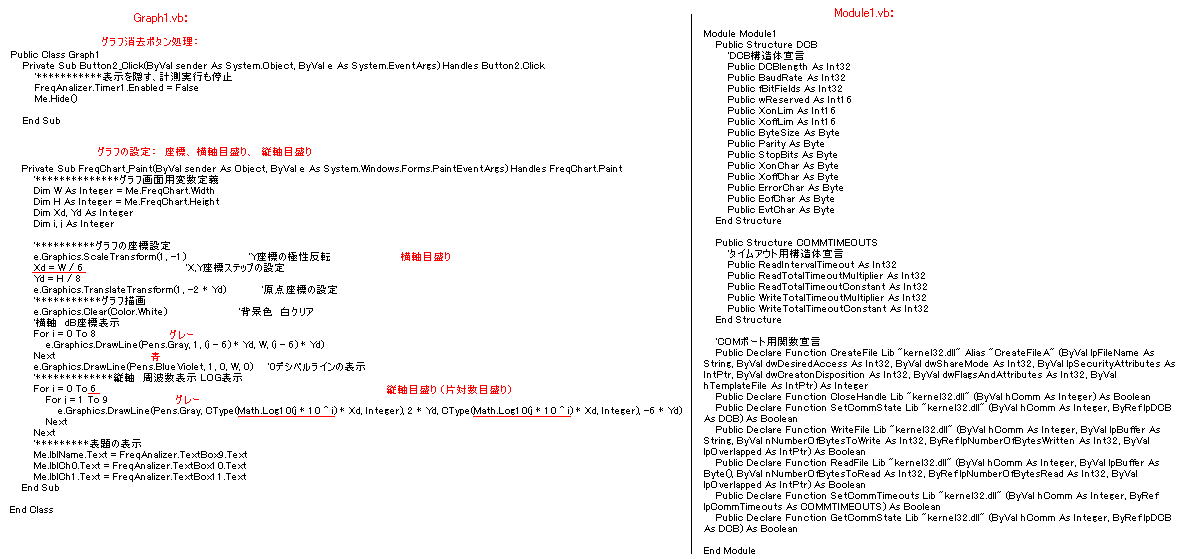
丂丂丂丂仠丂俥倰倕倯俙値倎倢倝倸倕倰乮儐乕僓乕傾僾儕晹乮俥倰倕倯俙値倎倢倝倸倕倰丏倴倐丄 俧倰倎倫倛侾丏倴倐丄 俵倧倓倳倢倕侾丏倴倐乯偺傒乯丗丂仏丂僾儘僕僃僋僩堦幃偼丄嶲峫暥專晅懏偺俠俢嶲徠